




1. Raskused klapi südamiku kokkupaneku protsessis
Käesolevas töös analüüsiti pärast teiste automaatsete monteerimissüsteemide projekteerimiskogemuse omandamist olemasolevat poolautomaatset koostesüsteemi ning süsteemi mehaaniline osa projekteeriti täielikult, tuginedes automaatse koostesüsteemi simulatsioonile.klapi südamikmonteerimisprotsess. Süsteemi projekteerimise plaanis püüame süsteemi töökindluse ja tõhususe suurendamiseks muuta mehaaniliste osade töötlemine mugavaks, minimeerida kulusid, muuta osade kokkupanek lihtsaks ja lihtsaks ning muuta süsteemi teatud määral avatuks ja laiendatavaks. ja loob hea aluse süsteemi kulutasuvuse parandamiseks.
Theventiiltuumkoostesüsteem jaguneb oma mehaanilise konstruktsiooni poolest peamiselt kolmeks osaks, nimelt: kaks montaažiosa töölaua vasakus ülanurgas, kolm montaažiosa alumises vasakus nurgas ja seitse montaažiosa töölauaosa paremal küljel. Kaheosalise koostu tehniline raskus seisneb selles, kuidas tagada tihendusrõnga ümmargune kuju. Lõikeprotsessi ajal avaldab see tera aksiaalset ekstrusioonijõudu, nii et seda on lihtne deformeerida. Teiseks, kui monteerimisprotsessi käigus tuvastatakse ülekandetööriista komponendil südamikuga varras, on vaja läbi viia vibratsiooni abil sõelumine ja kokkupanek ukse südamiku erinevate komponentide vahel. Seetõttu langeb iga komponent vastavasse asendisse, et saada koostelüliks. Protsessi raskus seisneb selles. Ülaltoodud probleemid on peamised põhjused, miks selles etapis suureneb defektsete toodete arv klapisüdamiku komplektis. Sellest lähtuvalt optimeerib käesolev artikkel klapisüdamiku kokkupaneku protsessi ja lisab kvaliteedikontrollisüsteemi, et parandada klapisüdamiku komplekti kvalifikatsiooni määra.
2. Intelligentse klapi südamiku kokkupaneku skeem
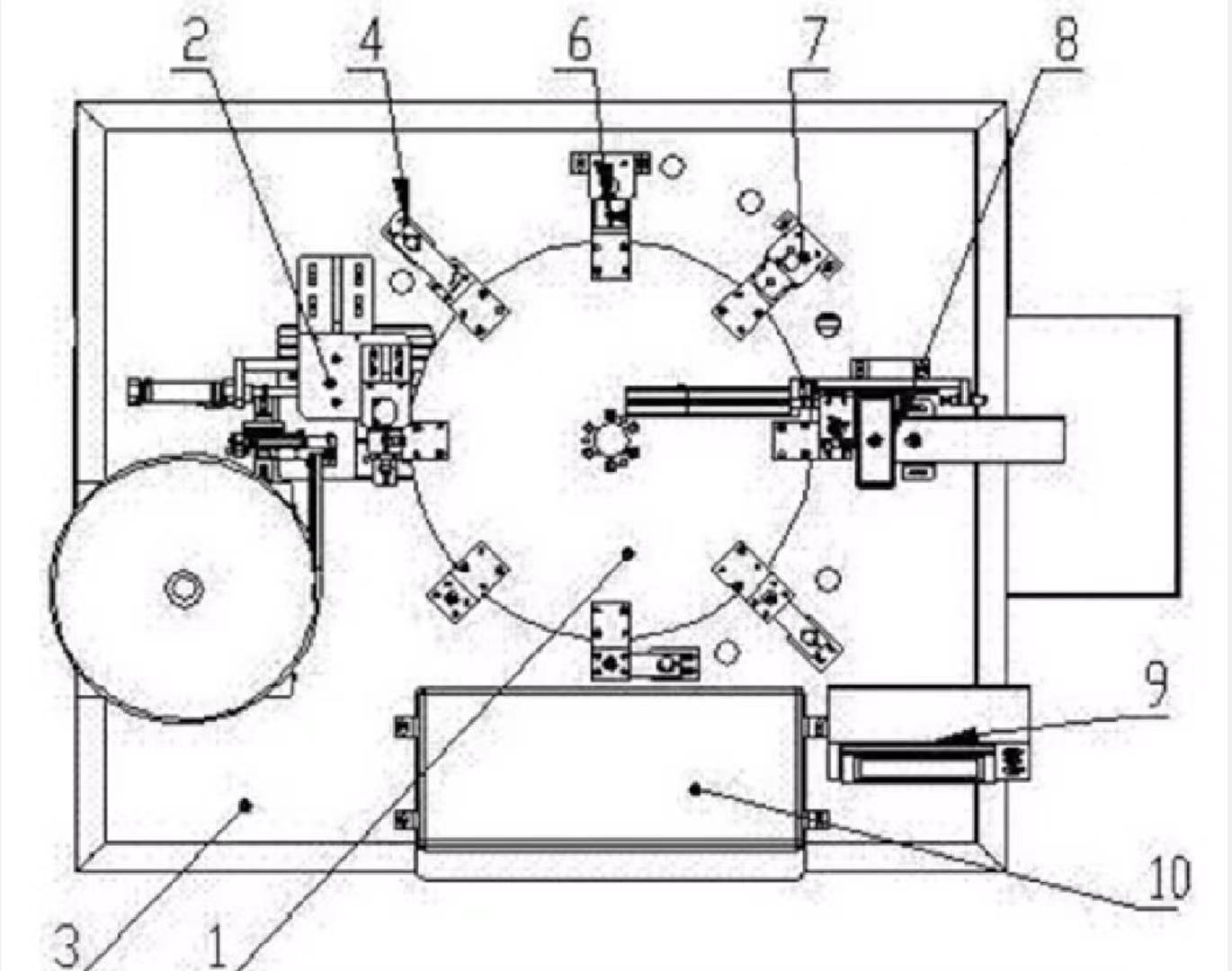
Tööliides ja PLC moodustavad loogilise juhtimisosa ning tuvastussüsteemil ja PLC-l on kahesuunaline teabevoog koostesüsteemi olekuandmete kogumiseks ja juhtsignaali väljastamiseks. Täidesaatva osana juhib ajamisüsteemi otse PLC väljundosa. Välja arvatud etteandesüsteem, mis vajab käsitsi abi, on selle süsteemi muud protsessid teostanud intelligentse koostamise. Hea inimese ja arvuti suhtlus saavutatakse puutetundliku ekraani kaudu. Arvestades mehaanilise konstruktsiooni kasutamise mugavust, on ukse südamiku paigutuskast puuteekraani kõrval. Tuvastamismehhanism, uksesüdamiku pealt avanev puhumiskomponent, klapisüdamiku kõrguse tuvastamise komponent ja sulgemismehhanism on paigutatud vastavalt pöördaluse tööriistakomponendi ümber, realiseerides uksesüdamiku koostu montaažiliini tootmisplaani. Tuvastamissüsteem viib peamiselt lõpule südamiku varda tuvastamise, paigalduskõrguse tuvastamise, kvaliteedikontrolli jne, mis mitte ainult ei realiseeri materjali valiku ja klapi südamiku lukustuse automatiseerimist, vaid tagab ka montaažiprotsessi stabiilsuse ja kõrge efektiivsuse. Süsteemi iga üksuse struktuur on näidatud joonisel 1.
Nagu on näidatud alloleval joonisel, on pöördlaud kogu protsessi keskne lüli ja klapisüdamiku kokkupanek viiakse lõpule pöördaluse ajamiga. Kui teine tuvastusmehhanism tuvastab kokkupandava komponendi, saadab see signaali juhtimissüsteemi ja juhtimissüsteem koordineerib iga protsessiüksuse tööd. Esiteks raputab vibreeriv ketas ukse südamiku välja ja lukustab selle sisselaskeklapi suudmesse. Esimene tuvastamismehhanism sõelub halva materjalina otse klapisüdamikud, mida pole edukalt paigaldatud. Komponent 6 tuvastab, kas klapi südamiku ventilatsioon on kvalifitseeritud, ja komponent 7 tuvastab, kas klapi südamiku paigalduskõrgus vastab standardile. Hea toote kasti võetakse ainult need tooted, mis on kvalifitseeritud ülaltoodud kolmel lingil, vastasel juhul käsitletakse neid defektsete toodetena.
Arukas kokkupanekklapi südamikon süsteemi disaini tehniline raskus. Selles konstruktsioonis kasutatakse kolmesilindrilist konstruktsiooni. Liugsilinder juhib tühjendust, et tagada tühjenemise kordumatus; teine silinder tagab, et lukuvarras on joondatud väljalaskeavaga, ja teeb seejärel koostööd liugsilindriga, et lõpetada klapi südamiku sisenemine lukuvardale, ja seejärel surub teine silinder jätkuvalt kogu lukustusmehhanismi liikumiseks ja imiotsik imeb klapi, kui see jõuab tööriista põhja. Lõpuks, pärast seda, kui kolmas silinder lükkab lukustusmehhanismi paika, saadab servomootor klapi südamiku sisselaskeklapi suudmesse, et lõpetada klapi südamiku kokkupanek. See protsess tagab piki- ja külgsuunalise liikumise positsioonide täpsuse ja kordumatuse ning annab hea lahenduse uksesüdamiku kokkupaneku tehnilistele raskustele..
3. Klapisüdamiku koostesüsteemi põhikomponentide projekteerimine
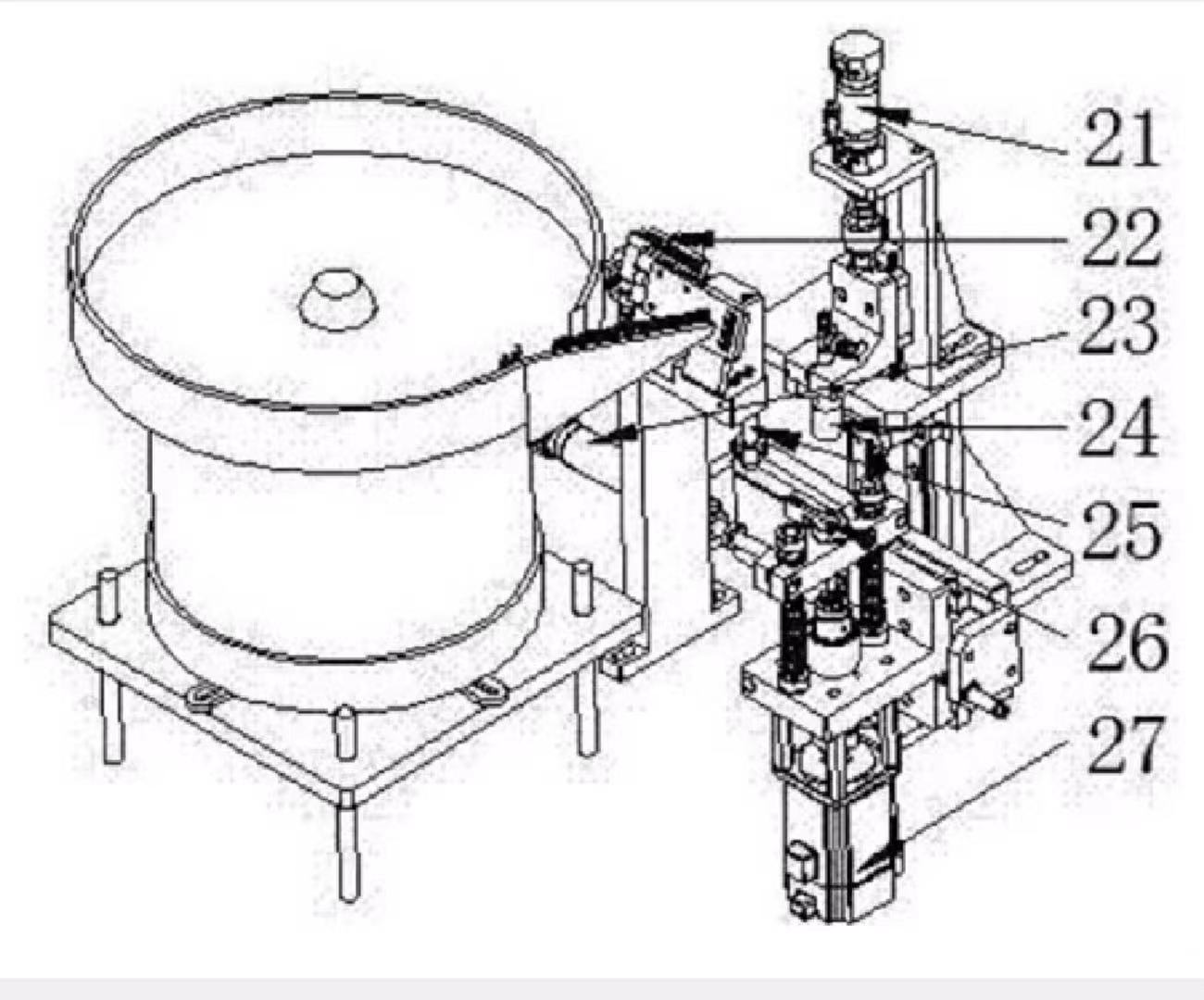
Installimise põhiprotsessinaklapi südamikklapil on klapi südamiku lukustamisel väga kõrged nõuded klapisüdamiku liikumisasendi täpsusele, seega vajab see lõpuleviimiseks piki- ja külgmehhanismide koordineerimist. Selle osa konstruktsioonis on see jagatud üheks toiminguks, klapi südamiku tühjendustegevuseks, lukustushoova lukustustoiminguks ja klapisüdamiku laadimiseks klapiotsikule. Selle mehaaniline struktuur on näidatud joonisel 2. Nagu on näha jooniselt 2, on klapisüdamiku mehaaniline struktuur jagatud kolmeks osaks. Kolm osa töötavad kooskõlastatult üksteist mõjutamata. Kui iseseisev toiming on lõpule viidud, surub silinder mehhanismi, et liikuda järgmisse koosteasendisse.
Liikumisasendi täpsuse tagamiseks võetakse vea kontrollimiseks 1,4 mm piires kasutusele elektrilise juhtimise ja mehaanilise piiri terviklik disain. Klapi südamik ja klapiotsiku keskosa on koaksiaalsed, nii et servomootor suudab klapi südamiku sujuvalt klapiotsikusse suruda, vastasel juhul kahjustab see osi. Mehaanilise konstruktsiooni seiskumine või elektriliste signaalide ebanormaalsed impulsid võivad monteerimistöödes põhjustada kergeid kõrvalekaldeid. Selle tulemusena ei vasta ventiilisüdamiku kokkupanemise järel ventilatsiooni jõudlus standardile ja montaažikõrgus ei ole kvalifitseeritud, mis põhjustab toote rikke. Seda tegurit võetakse süsteemi projekteerimisel täielikult arvesse, halbade toodete sorteerimiseks kasutatakse õhulöögi tuvastamist ja kõrguse tuvastamist.
Postitusaeg: 09.09.2022
